日本ロボット学会誌/43 巻 (2025) 6 号に、以下の論文が掲載されました。


日本ロボット学会誌/42 巻 (2024) 10 号に、以下の論文が掲載されました。
協生農法環境における農作業支援ロボットの開発—第8報:アーム先端部で交換可能な複数種対応の 種植え機構および種子団子製造機の開発—土井 瑛人, 前田 菜夏香, 田中 大雅, 政谷 巧樹, 青竹 峻太郎, 舩橋 真俊, 三木 浩, 大谷 拓也, 高西 淳夫
続報として、日本ロボット学会誌/43 巻 (2025) 1 号 に、以下の論文が掲載されました。
協生農法環境における農作業支援ロボットの開発—第9報:パラレルコンベックス駆動による高伸縮比アーム—前田 菜夏香, 土井 瑛人, 政谷 巧樹, 田中 大雅, 青竹 峻太郎, 舩橋 真俊, 三木 浩, 大谷 拓也, 高西 淳夫

Masa Funabashi and Taka Sasaki presented the following papers at the 5th World Conference on Complex Systems, which was held on November 11th and 12th, 2024, in Casablanca, Morocco.


The abstract book is available here.
Link to the IEEE Proceeding of the 2024 World Conference on Complex Systems (WCCS)

A video article “Synecoculture experiments: Human augmentation of ecosystems and Planetary Health,” based on the presentation at Ecosummit 2023, was published from Science Talks.

The following paper was presented at the 33rd IEEE International Conference on Robot and Human Interactive Communication (ROMAN) held in August 26-30, 2024, at Pasadena, CA, USA.
| Locating the Fruit to Be Harvested and Estimating Cut Positions from RGBD Images Acquired by a Camera Moved Along Fixed Paths Using a Mask-R-CNN Based Method |
| Zhao, Wentao (Waseda University), Otani, Takuya (Shibaura Institute of Technology), Sugiyama, Soma (Waseda University), Mitani, Kento (Waseda University), Masaya, Koki (Waseda University), Takanishi, Atsuo (Waseda University), Aotake, Shuntaro (Waseda University), Funabashi, Masatoshi (SonyCSL/Kyoto University), Ohya, Jun (Waseda University) |
| Keywords: Degrees of Autonomy and Teleoperation, Machine Learning and Adaptation Abstract: Compared to traditional agricultural environments, the high density and diversity of vegetation layouts in Synecoculture farms present significant challenges in locating and harvesting occluded fruits and pedicels (cutting points). To address this challenge, this study proposes a Mask R-CNN-based method for locating fruits (tomatoes, yellow bell peppers, etc.) and estimating the pedicels from RGBD images acquired by a camera moved along fixed paths. After obtaining masks of all fruits and pedicels, this method judges the matching relationship between the located fruit and pedicel according to the 3D distance between the fruit and pedicel. Subsequently, this research determines the least occluded best viewpoint for harvesting based on the visible real areas of located fruits in images acquired under the fixed paths, and harvesting is then completed from this best viewpoint following a straight path. Experimental results show this method effectively identifies occluded targets and their cutting positions in both Gazebo simulation environments and real-world farms. This method can select the least occluded viewpoint for a high harvesting success rate. |
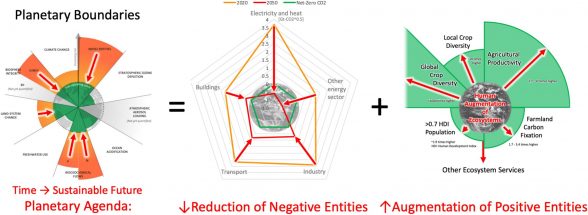
A research article on Synecoculture and Augmented Ecosystems has been published.

Masatoshi Funabashi , Sony CSL senior reseacher, presented two research papers at the Complex Computational Ecosystems 2023 in Baku, Azerbaijan, and one of them received the Best Non-Student Presentation Award.
■ [Best Non-Student Presentation Award ] “Vegee Brain Automata: Ultradiscretization of essential chaos transversal in neural and ecosystem dynamics” (Masatoshi Funabashi)
Get the final version manuscript here.
■“Modeling ecosystem management based on the integration of image analysis and human subjective evaluation – Case studies with synecological farming” (Shuntaro Aotake, Atsuo Takanishi, Masatoshi Funabashi)
Get the final version manuscript here.
Both papers have been published in Springer Lecture Notes in Computation Science.
日本ロボット学会誌40 巻 (2022) 9 号に、以下の論文が公開されました。
(English Title: Development of the Agricultural Robot in SynecocultureTM Environment —1st Report, Development of Moving Mechanism on the Farm and Realization of Weeding and Harvesting—)