Masa Funabashi presented a poster at the International Workshop on Space Agriculture and Horticulture 2025:
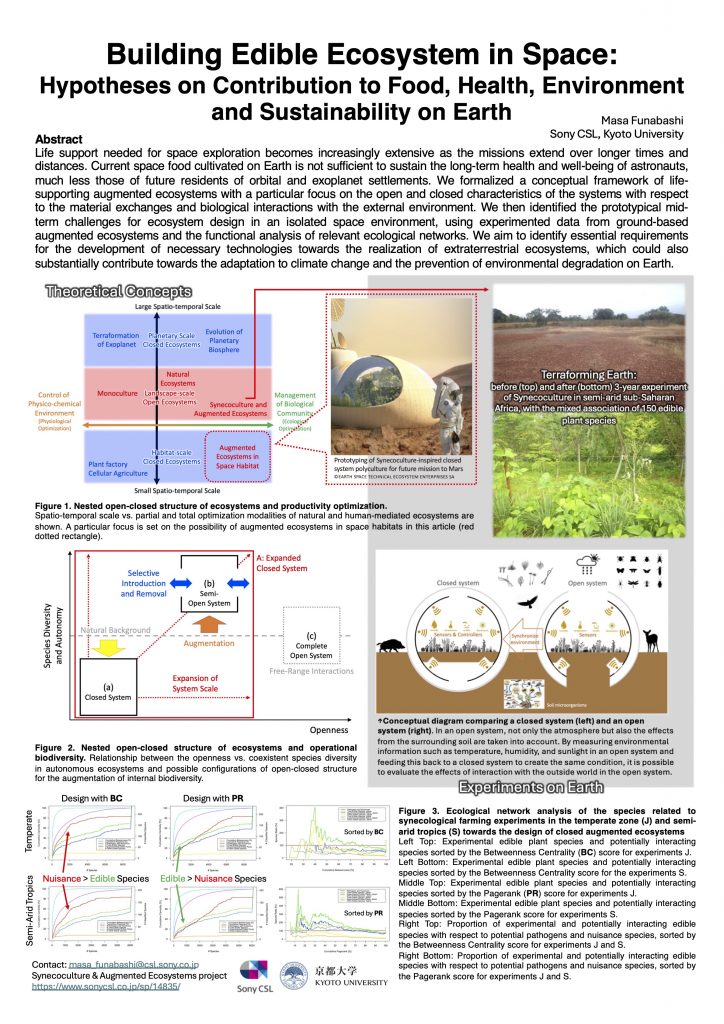


Masa Funabashi presented a poster at the International Workshop on Space Agriculture and Horticulture 2025:

鳥取県江府町におけるシネコカルチャー実践事例が、Forbes JAPAN BrandVoice に紹介されました(2025/1/30)。



日本ロボット学会誌/42 巻 (2024) 10 号に、以下の論文が掲載されました。
協生農法環境における農作業支援ロボットの開発—第8報:アーム先端部で交換可能な複数種対応の 種植え機構および種子団子製造機の開発—土井 瑛人, 前田 菜夏香, 田中 大雅, 政谷 巧樹, 青竹 峻太郎, 舩橋 真俊, 三木 浩, 大谷 拓也, 高西 淳夫
続報として、日本ロボット学会誌/43 巻 (2025) 1 号 に、以下の論文が掲載されました。
協生農法環境における農作業支援ロボットの開発—第9報:パラレルコンベックス駆動による高伸縮比アーム—前田 菜夏香, 土井 瑛人, 政谷 巧樹, 田中 大雅, 青竹 峻太郎, 舩橋 真俊, 三木 浩, 大谷 拓也, 高西 淳夫

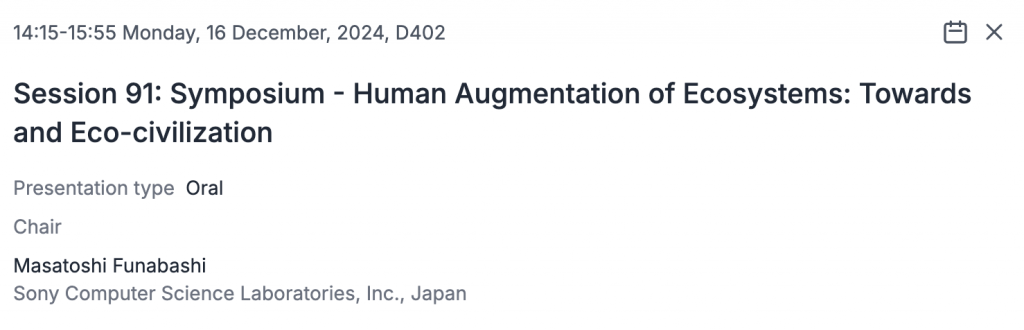
Symposium “Human Augmentation of Ecosystems: Towards an Eco-Civilization“
Chair: Masa Funabashi Co-Chair: Tatsuya Kawaoka
Abstract
In line with Ecosummit 2024’s theme of fostering “Eco-Civilization for a Sustainable and Desirable Future,” this symposium will explore pioneering advancements in ecosystem augmentation, drawing from recent research and practical applications in Japan, Africa, Latin America and China. Under the theme “Human Augmentation of Ecosystems,” which was previously published as a perspective from Nature Research [1], we aim to convene interdisciplinary perspectives on nature-positive solutions grounded in ecological science, artificial intelligence, and ESG-based management strategies. These contributions will highlight how ecosystem augmentation can sustainably enhance biodiversity, health, and climate resilience, ultimately contributing to a shared natural-social common capital.
The symposium brings together experts from academia and industry, including speakers from Sony Group companies in Japan and China, which are advancing technological solutions for sustainable ecosystems, and the Research Division of Social Common Capital and the Future at Kyoto University, which is at the forefront of establishing frameworks for natural-social common capital. Our symposium will cover foundational science, innovative technologies, and emerging practices across different regions, emphasizing the role of ecosystems as self-organizing, resilient entities capable of supporting human well-being and environmental stability.
Objectives and Scope
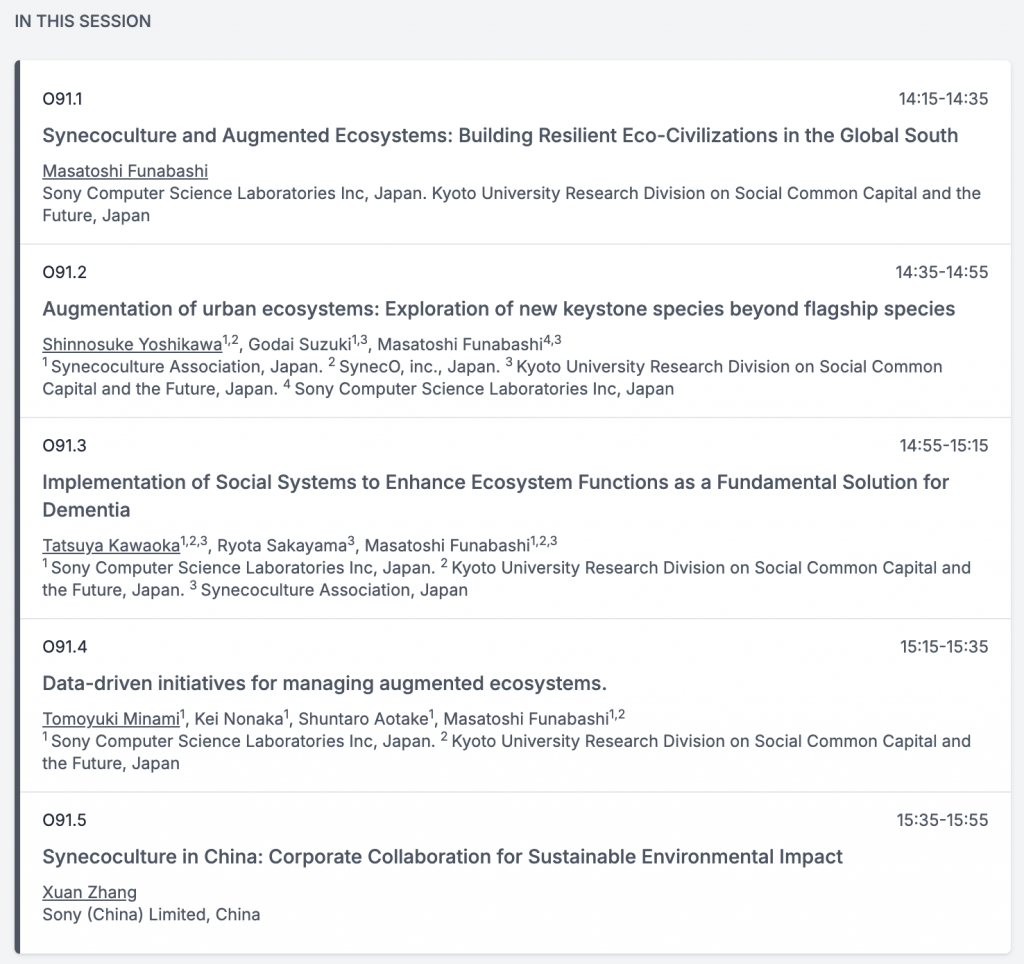
The symposium’s goal is to present a comprehensive, multi-faceted exploration of ecosystem augmentation and its role in fostering eco-civilization. Key topics that will be explored by more than 4 presenters will include:
We will begin with the scientific underpinnings of ecosystem augmentation, focusing on Synecoculture, a method developed to achieve high biodiversity and productivity in human-managed ecosystems [2]. This approach leverages the natural interactions among plant species to create self-sustaining ecosystems without chemical inputs. Presentations will discuss the ecological principles and data underlying this system, offering insights into its global adaptability, particularly in regions with deteriorating agricultural viability.
With global biodiversity under unprecedented pressure, integrating big data and AI into ecosystem management is crucial for long-term resilience. Our symposium will highlight how big data and AI technologies can be deployed to monitor and optimize ecosystem functions, enhance real-time decision-making, and facilitate adaptive management practices that align with ESG priorities. We will share case studies from Sony Group companies, showcasing practical applications that merge ecological intelligence with advanced analytics.
As the Global South increasingly experiences environmental challenges, innovative ecosystem augmentation practices are emerging as viable solutions. We will feature new implementations in coastal regions of China, where ecosystem augmentation is mitigating habitat degradation, reducing run-offs that affect marine biodiversity, and strengthening local climate resilience. The potential scalability of these applications to other regions will also be discussed.
Finally, the symposium will delve into the connections between augmented ecosystems and human health, with a particular focus on immune-related diseases. Research is demonstrating that exposure to biodiverse environments can positively impact immune health, supporting ecosystem services as a public health strategy. We will present findings that suggest how augmented ecosystems contribute to a reduction in chronic illnesses linked to immune dysfunction.
Relevance and Significance
The concept of “Human Augmentation of Ecosystems” embodies a transformative vision for eco-civilization, fostering symbiotic relationships between human societies and natural systems. By engaging a multidisciplinary panel of experts, this symposium offers Ecosummit 2024 a valuable platform to examine the ecological, technological, and social dimensions of sustainable ecosystem management. Through international collaboration and innovative methodologies, this symposium will underscore the potential of augmented ecosystems as foundational assets for human resilience and a sustainable future.
References




Masa Funabashi and Taka Sasaki presented the following papers at the 5th World Conference on Complex Systems, which was held on November 11th and 12th, 2024, in Casablanca, Morocco.


The abstract book is available here.
Link to the IEEE Proceeding of the 2024 World Conference on Complex Systems (WCCS)



